人体检测与跟踪
不知道大家有没有玩过类似XBOX的体感游戏机,上边会有一个相机,动态识别我们的动作,比如跳舞、打球,是不是还挺神奇的,这就是人体检测与跟踪的应用。
TogetherROS中也集成了一套类似的算法,可以识别人体、人头、人脸、人手等一系列关键点,我们来体验一下。
编程开发方法
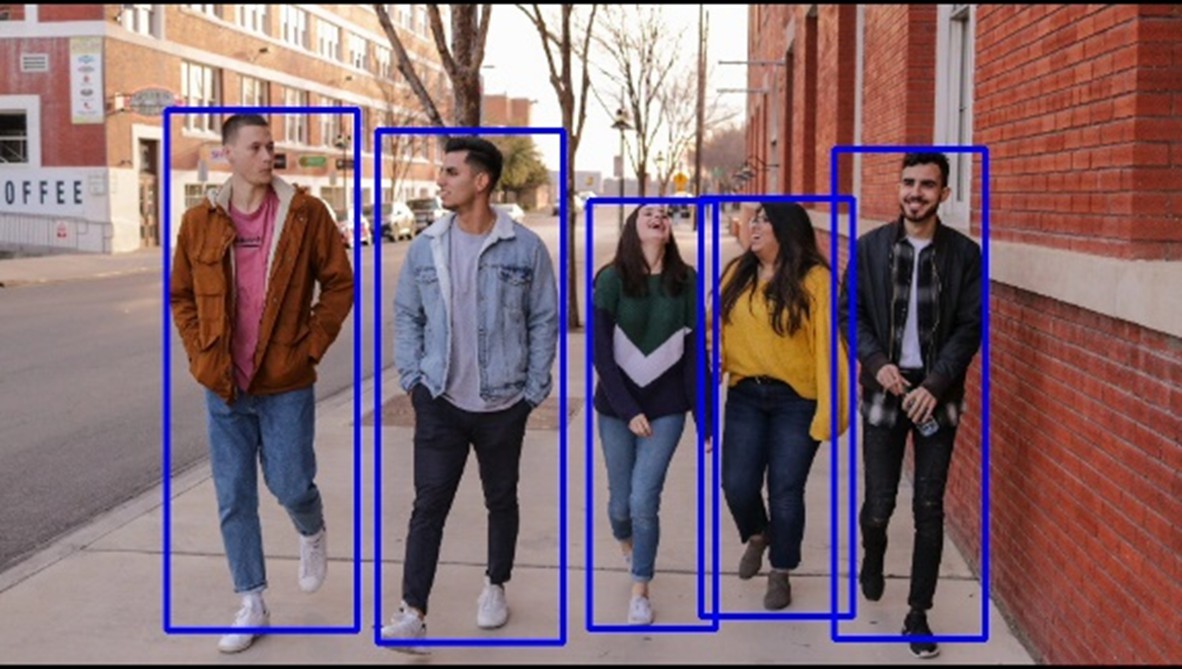
先来看一个人体识别的基础应用,我们驱动相机后,实时采样视觉信息,然后再通过检测算法,识别每一幅图片中人体位置,并把识别的结果保存成一张图片,便于我们查看。
运行例程
# 下载例程代码(与之前课程下载的代码一致)
$ cd /userdata/dev_ws/src
$ git clone https://gitee.com/guyuehome/togetherros_tutorials.git
$ cd /userdata/dev_ws/
$ colcon build
# 终端1,运行相机
$ source /opt/tros/setup.bash
$ ros2 run mipi_cam mipi_cam --ros-args -p out_format:=nv12 -p image_width:=960 -p image_height:=544 -p video_device:=F37
# 终端2,运行例程
$ source /opt/tros/setup.bash
$ source ./install/local_setup.bash
$ mkdir -p config && cp -r /opt/tros/lib/dnn_node_example/config/multitask_body_kps_960x544.hbm config/
$ ros2 run cpp_dnn_demo cpp_dnn_demo --ros-args -p image:=config/test.jpg
代码解析
#include "opencv2/core/mat.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "dnn_node/dnn_node.h"
#include "dnn_node/util/image_proc.h"
#include "sensor_msgs/msg/image.hpp"
using namespace hobot::dnn_node;
class BodyDetNode : public DnnNode {
public:
BodyDetNode(
const std::string & node_name = "body_det",
const rclcpp::NodeOptions & options = rclcpp::NodeOptions()) :
DnnNode(node_name, options) {
// 获取模型输入图片的尺寸,包括图片的宽model_input_width_和高model_input_height ,用于模型前处理
if (Init() != 0 ||
GetModelInputSize(0, model_input_width_, model_input_height_) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("example"), "Node init fail!");
}
//创建图片消息的subscriber,订阅的topic为”/image_raw”,消息类型为sensor_msgs::msg::Image。订阅到的图片用于算法模型推理
ros_img_subscription_ = this->create_subscription<sensor_msgs::msg::Image>(
"/image_raw", 10, std::bind(&BodyDetNode::FeedImg, this,
std::placeholders::_1));
}
~BodyDetNode() override {}
void FeedImg(const sensor_msgs::msg::Image::ConstSharedPtr msg);
protected:
int SetNodePara() override {
if (!dnn_node_para_ptr_) return -1;
//指定模型推理使用的模型文件名和模型名
dnn_node_para_ptr_->model_file = "config/multitask_body_kps_960x544.hbm";
dnn_node_para_ptr_->model_name = "multitask_body_kps_960x544";
//指定模型输出的人体框的解析方法,其中人体框输出索引为box_output_index_
//使用的解析方法为hobot_dnn预定义的检测框解析方法FaceHandDetectionOutputParser。
std::shared_ptr<OutputParser> box_out_parser =
std::make_shared<FaceHandDetectionOutputParser>();
dnn_node_para_ptr_->output_parsers_.emplace_back(
std::make_pair(box_output_index_, box_out_parser)
);
return 0;
}
int PostProcess(const std::shared_ptr<DnnNodeOutput> &node_output)
override;
private:
int model_input_width_ = -1;
int model_input_height_ = -1;
const int32_t box_output_index_ = 1;
sensor_msgs::msg::Image::ConstSharedPtr img_msg_;
rclcpp::Subscription<sensor_msgs::msg::Image>::ConstSharedPtr
ros_img_subscription_ = nullptr;
};
//输出模型结果,并将结果渲染到图片后保存在本地
int BodyDetNode::PostProcess(
const std::shared_ptr<DnnNodeOutput> &node_output) {
if (node_output->outputs.empty() ||
static_cast<int32_t>(node_output->outputs.size()) < box_output_index_) {
RCLCPP_ERROR(rclcpp::get_logger("example"), "Invalid outputs");
return -1;
}
auto *filter2d_result =
dynamic_cast<Filter2DResult *>(node_output->outputs[box_output_index_].get());
if (!filter2d_result) return -1;
std::stringstream ss;
ss << "img encoding: " << img_msg_->encoding
<< ", stamp: " << img_msg_->header.stamp.sec << "," << img_msg_->header.stamp.nanosec
<< "\nout box size: " << filter2d_result->boxes.size() << "\n";
cv::Mat nv12(img_msg_->height * 3 / 2, img_msg_->width, CV_8UC1,
const_cast<char*>(reinterpret_cast<const char*>(img_msg_->data.data())));
cv::Mat bgr;
cv::cvtColor(nv12, bgr, CV_YUV2BGR_NV12);
for (auto &rect : filter2d_result->boxes) {
ss << "rect: " << rect.left << " " << rect.top
<< " " << rect.right << " " << rect.bottom << "\n";
// 图片渲染
cv::rectangle(bgr,
cv::Point(rect.left, rect.top), cv::Point(rect.right, rect.bottom),
cv::Scalar(255, 0, 0), 3);
}
std::string result_image = "render_" +
std::to_string(img_msg_->header.stamp.sec) + "." +
std::to_string(img_msg_->header.stamp.nanosec) + ".jpg";
ss << "Render img to file: " << result_image;
RCLCPP_INFO(rclcpp::get_logger("example"), "%s", ss.str().c_str());
cv::imwrite(result_image, bgr);
return 0;
}
//将nv12格式的图片转成模型输入的数据类型DNNInput后,输入给推理任务
void BodyDetNode::FeedImg(const sensor_msgs::msg::Image::ConstSharedPtr img_msg) {
if (!img_msg) return;
if ("nv12" != img_msg->encoding) {
RCLCPP_ERROR(rclcpp::get_logger("example"), "Only support nv12 img encoding!");
return;
}
img_msg_ = img_msg;
// 创建模型输入数据
auto inputs = std::vector<std::shared_ptr<DNNInput>>{
ImageProc::GetNV12PyramidFromNV12Img(
reinterpret_cast<const char*>(img_msg->data.data()),
img_msg->height, img_msg->width, model_input_height_, model_input_width_)};
// 运行推理,DnnNode基类中定义并实现的启动推理接口。
Run(inputs);
}
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<BodyDetNode>());
rclcpp::shutdown();
return 0;
}
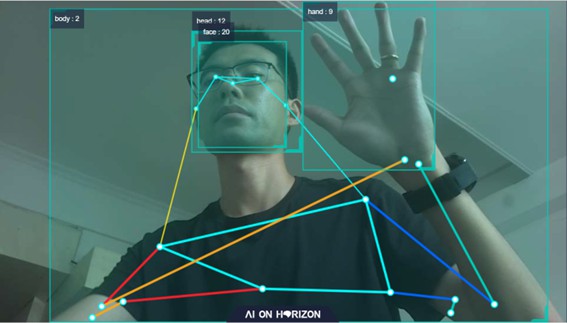
人体检测与跟踪
结果保存成图片,虽然便于保留数据,但是不利于动态看到效果,我们不如再来实时动态效果显示。
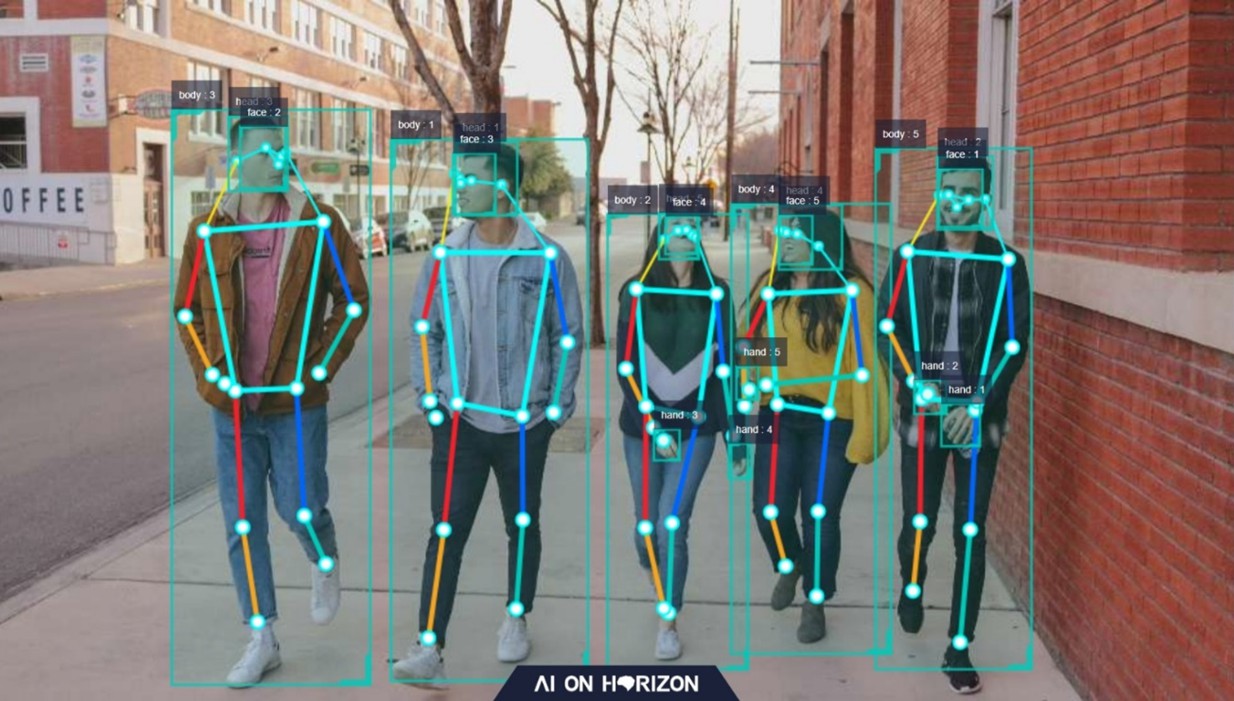
在这个案例中,我们在之前人体识别的基础上,进一步实现了人体部位的识别和骨骼、眼神等关键点的识别,比如头、脸、身体、手掌、眼睛。
识别的结果同样是通过浏览器来进行查看。
# 启动webserver服务
$ cd /opt/tros/lib/websocket/webservice/
$ chmod +x ./sbin/nginx && ./sbin/nginx -p .
# 运行例程
$ source /opt/tros/setup.bash
$ cp -r /opt/tros/lib/mono2d_body_detection/config/ .
$ ros2 launch /opt/tros/share/mono2d_body_detection/launch/hobot_mono2d_body_detection.launch.py